背景介绍:
根据国务院办公厅《关于全面推进城镇老旧小区改造工作的指导意见》,近两年,城镇老旧小区改造作为重大民生工程和发展工程在全国各地进行地如火如荼。以武汉市为例,“十四五”期间,预计将完成1423个老旧小区(2000年底前建成)、约3600万平方米的改造任务。

改造不但面临范围大、面积广的问题,且涉及城市规划、市政建设、公共服务、政府决策、民生环保、动态监测等各个城市系统与单位,对信息的获取与整合提出了新的挑战。而老旧建筑因年代久远,很多项目竣工资料丢失或信息不全,也给改造工作的开展造成了很大困扰。
传统的测量手段已经跟不上城市建设、更新的步伐。那么,如何通过快速的现场测量轻松获取老旧小区的实际状况,以较低的人力、物力、财力和时间成本,帮助完成较大范围的城市改建任务?
三维激光扫描测量方案:
移动式三维激光扫描测量技术,作为一种新兴的测绘技术,可以密集地获取目标对象数据点,实时、高精度、数字化和智能化的优势,为高效准确获取城市空间信息提供了保证。
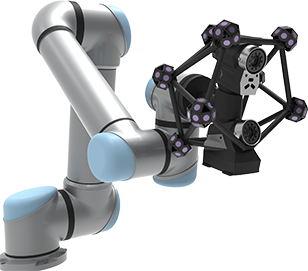
针对武汉某计划改建的老旧小区,我们携带中观RigelSLAM大空间手持激光3D扫描仪去现场做了测量。RigelSLAM系列产品采用SLAM技术(即实时定位与建图技术)、IMU惯导系统和自研实时算法,使得在各种未知环境中,无需GPS等GNSS定位,均可以轻松便捷地采集到准确而全面的数据。


与常见测量方法相比,RigelSLAM可以很好地解决以下难点:
1. 传统地籍测量利用全站仪来采集碎步点数据,不但测量速度慢,且单点测量对实际情况的反映也差。
2. 采用GPS RTK技术,在狭隘空间下可能会接受不到信号,导致无法测量。
3. 常见的架站式三维激光扫描仪必须固定在某个地点进行测量,操作不灵活。
4. 航空摄影测量则存在禁飞区及成果区分困难等问题。
方案实施流程
外业数据采集
备注:
1、扫描路径可根据建筑分布灵活规划,完成O型闭合可提高采集精度;
2、对于多栋建筑可分段采集,再将数据在后处理软件中进行点云拼接;
3、测量不受光照条件或其他光线影响,可灵活选择作业时间。

内业数据处理

备注:RigelSLAM提供实时配准功能,从设备导出的数据无须点云配准,导出即用。

▲ 处理后点云数据(某小区示意)


▲ 建造基础模型(独栋建筑示意)
 ▲ 建筑立面图(独栋建筑示意)
▲ 建筑立面图(独栋建筑示意)

▲ 建筑立面图(单元建筑示意)
作业效率
【现场采集人员】1人
【现场采集时间】10min 即测完 7115 平方米老旧小区
【数据处理时间】10min 点云处理 + 6h 成果绘制
小结
RigelSLAM大空间手持激光3D扫描系统,便携手持式、操作简单,只需单人作业,从老旧小区中走过,即可连续自动、快速捕获建筑物的高精度点云数据,极大地提高了测量效率。此外,采集的点云数据可导入CAD、3DS Max、Revit等多平台,实现不同的利用目的。
RigelSLAM为老旧小区改造提供了数字化改建手段,可以帮助解决原有建筑信息不全、精准度低、改造进展缓慢、效果难以量化等问题。
除老旧小区建筑立面的测量外,RigelSLAM亦可广泛应用于,现代楼盘、城镇房屋、农村地籍、古建筑等,为城市的发展建设,提供精准可交互的3D数据信息。
Copyright ©2017 - 2020 武汉中观自动化科技有限公司 鄂ICP备16022383号-2
 鄂公网安备 42018502006916号
网站地图
鄂公网安备 42018502006916号
网站地图
尊敬的用户,您好!
请您填写如下表格信息,负责您所在区域的项目经理稍后会跟您详细对接。公司/单位名称
姓名
联系电话
验证码
电子邮箱
所属行业
请选择您所属的行业
所在城市
请选择您所需的服务