近日,武大学子“神农记”团队聚焦我国农产品供需对接问题,打造的新型线上云认领平台,在第十三届全国大学生电子商务“创新、创意及创业”挑战赛(以下简称三创赛)中荣获全国总决赛特等奖和“最佳创新奖”、“最佳创意奖”、“最佳创业奖”三项单项奖。该项目实施过程中,团队与中观达成合作,中观RigelSLAM为云认领平台的实景重建提供技术支持。

云认领/小生产对接大市场
该项目提出“云+网+端”的认领新模式,通过打造集云认领、云种植、云观赏、云互动等功能于一体的创新平台,提供兼具功能性和趣味性的认领服务,旨在搭建供销网,线上线下相串联,推动小生产与大市场对接。

这一创新方案面向供给方——解决了乡镇农产品的滞销难题,可以促进地方农业发展;面向需求方——丰富和提升用户的购买体验,以“有保障、有品质、有趣味”的服务和产品引领农副产品消费转型升级。同时,认领平台为线上“农场主”提供实地种植体验、周边景区参观等线下配套服务,致力于以农旅联动开拓乡村文旅新模式。
实景三维/线上线下同步观
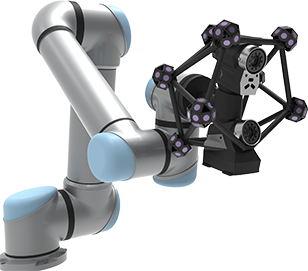
为增强用户的深度参与感与体验感,神农记云认领平台的田地和作物均以实景三维呈现。中观的RigelSLAM大空间手持激光3D扫描仪,以快速、精准、全面的三维空间信息捕获能力,为“田间”到“云端”的实景复现提供了高效工具。

RigelSLAM凭借同步定位建图技术,仅单人手持扫描,在行走中即可实现高精度点云数据的连续自动采集,极其简单高效;也无需GPS、RTK定位,拥有极强的适应性,可在各种环境中自由穿梭进行数据采集。针对具有高密度覆盖性的农业、林业信息,可高效便捷地实现全面采集、实时监测。


RigelSLAM实时扫描实时建图,扫描结束便得到配准好的点云数据,导出即用,其直观可视化、智能化、精细化的数据优势,为后续渲染建模周期的大幅缩短提供了极大的便利。

| 恩施试验田航拍图

| 试验田实景三维渲染图
该项目在恩施建立了试点基地,通过激光3D扫描、航拍摄影、农业传感器检测等实现了多维数据的急速融合,以点云、图像、生长数据联合建模,在云端实现实景重现,全方位展示农场的生态之美。线上“农场主”既可以实时了解作物的生长信息、环境状态,也可以在云端观赏农家风光。
“神农记”团队将SLAM等新技术与智慧农业项目进行创新融合,高校、企业与农业经营主体联合对接,开拓了一个振兴乡村的新农业发展方向。未来,“神农记”将会继续推进该创业项目,按照既定计划以点带面推广到更多农作物,覆盖更多乡村区域,努力促进农业产业发展。
创新教育·产教融合
三创赛是激发大学生兴趣与潜能,培养大学生创新意识、创意思维、创业能力以及团队协同实战精神的学科性竞赛,是全国普通高校学科竞赛排行榜57项赛事中排名第13位的赛事。大赛对开展创新教育和实践教学改革、加强产学研之间的联系等起到积极示范作用,得到社会广泛认可。
中观执行总裁、武大遥感信息工程学院教授郑顺义作为“神农记”团队的指导老师,在此次大赛中也荣获“最佳指导老师”奖。

Copyright ©2017 - 2020 武汉中观自动化科技有限公司 鄂ICP备16022383号-2
 鄂公网安备 42018502006916号
网站地图
鄂公网安备 42018502006916号
网站地图
尊敬的用户,您好!
请您填写如下表格信息,负责您所在区域的项目经理稍后会跟您详细对接。公司/单位名称
姓名
联系电话
验证码
电子邮箱
所属行业
请选择您所属的行业
所在城市
请选择您所需的服务